Definitely getting chillier here, when I went to rub my eyes just now, was like two icy crinkle fingers.
I had fun on the module today trying to program a two-wheeled robot simulation to draw five interlocking squares. Much harder than it sounds, and Simon the robot is a bit trickier to move than the python turtle in TM112 was. It was difficult to get the robot to keep drawing in a straight line. To work out angles of direction I ended up mapping degrees to 100ths of a second of time spent turning. It was very hard to get things exactly how I wanted them though because the robot can only understand whole discrete values. In the end I came up with roughly 4.1 secs of turning time was required to complete a 360 degree turn, it was a very crude way of measuring, but kind of worked... 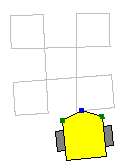
Personal Blogs
Chilling with robotics
Friday 26 October 2018 at 17:35
Visible to anyone in the world
Edited by Richie Cuthbertson, Thursday 30 September 2021 at 21:47
Comments
New comment
Make sure there is nothing else running, by which I mean eating CPU clock cycles, when the robot program is running. It then responds better.
New comment
ace
I remember loving Simon back when I did whatever robotics 10 pointer he was in back when.
New comment
Thanks will def check out the clock cycles, I do tend to have other stuff running in the background at the same time.